Features
Forestry Management
Harvesting
New Gear
‘Closing the gap’: OptiLog 2021 shows how technology can help boost loggers’ productivity
July 2, 2021 By Ellen Cools

As logging contractors face increasingly tight profit margins, it’s more important than ever that they to stay up-to-date about new technology that can help boost their productivity and efficiency.
That’s why on June 15, Canadian Forest Industries hosted the first-ever OptiLog Forestry Tech Forum, focused on the future of harvesting technologies and processes. The virtual event, which attracted over 200 attendees, saw presentations on a range of topics, including telematics, the evolution of forest machinery, GIS solutions, truck platooning, and the use of artificial intelligence (AI) in cutting decisions.
The future of the forest industry
Tigercat’s telematics product marketing manager Irfan Zardadkhan kicked off the event with an appropriate question: “Where will the future of AI lead the forestry industry?”
For Zardadkhan, the answer is clear: telematics will lead the way. His presentation focused on how telematics can help optimize loggers’ performance and reduce downtime.
But what exactly is telematics? Telematics is “a way of exchanging information between moving machinery and remote systems,” he explained. That information is shared with other computers, systems and people in a standardized way. This helps loggers save time and money, as operators no longer have to manually gather and compile data on machines, which is especially challenging if a contractor has multiple jobsites and machines.

Irfan Zardadkhan, product marketing manager, telematics, at Tigercat. Screenshot of OptiLog 2021.
Zardadkhan gave an overview of Tigercat’s telematics solutions, RemoteLog and LogOn, and how they can help loggers optimize their operations.
RemoteLog is a remote portal where users can monitor their machines and collect and analyze data. Most of this is done off-site, although operators can access a web browser on Tigercat’s machines through a built-in hotspot to access information.
This telematics platform tracks the movement of a machine for any given period of time, Zardadkhan explained, which allows loggers to track when a machine is active, idling, re-fueling, etc. This is ideal for fleet management, as loggers can also track machine movement history and plan routes to optimize a machine’s efficiency, he said. The platform also provides machine alerts when maintenance is required on a machine, sending diagnostic messages to owners, dealers and Tigercat.
Meanwhile, LogOn is accessible via a hotspot, and provides operators with access to production and maintenance reports, as well as pre-loaded operator and service manuals to fix errors. LogOn provides a full history of error messages, which can help dealer technicians find solutions more quickly when it comes to repairs It can also be used to communicate to RemoteLog via satellite, Zardadkhan explained – another way to help loggers save time and money.
Closing the gap
Technology like telematics not only helps loggers reduce their downtime and improve their efficiency, it can also help “close the gap” when it comes to operator influence on performance, explained Jim O’Halloran, product marketing manager at John Deere, during his presentation.
O’Halloran outlined how technology in the forestry industry has evolved over the years, from contractors on the ground doing manual felling to what he called the “BSF” period: Bigger, Stronger, and Faster. The focus since equipment became mechanized has been on building bigger, stronger and faster machines, he explained. But, we have reached a tipping point – now, a machine’s productivity levels vary significantly based on the operator’s ability.
“Upwards of 40 per cent of productivity variance in machines is based solely on the operator,” he said. This means manufacturers now need to develop technology that can help operators use machines more efficiently, and close the gap. This is the “ESP” period: Easier, Smarter and Precise.
Jim O’Halloran, product marketing manager, John Deere, presents at OptiLog 2021.
“The era of operator assistance is upon us,” O’Halloran explained. “There is a significant opportunity to drive enhancements and make equipment easier to use.”
This, in turn, will lessen the learning curve for the next generation of loggers.
One example of technology that helps operators perform better is John Deere’s Intelligent Boom Control (IBC), which is available on their wheeled harvesters and forwarders. With IBC, the repetitive operator motions are semi-automated.
O’Halloran likened it to reaching out with your hand to grab a glass of water. You don’t think about the angle your arm has to be at or the motion it follows, you focus on grabbing the glass with your hand. With IBC, “the operator doesn’t control the individual functions of the boom; they focus on the attachment only, and moving that,” he said.
The technology has made experienced operators more efficient and new operators more capable, he added. It reduces operator fatigue levels and shortens the learning curve for new operators, leading to a higher overall productivity rate.
‘Time is money’
Increasing operational efficiency and productivity was key for Tolko High Level’s woodlands operations. The mill began using a Geographic Information System (GIS) called Op Tracker to monitor their operations and machine performance in 2017. Mike Morgan and Nicholas Genier, harvest operations supervisor and woodlands operations supervisor, respectively, for Tolko High Level, provided a real-world example of how they have increased their operational efficiencies with Op Tracker.
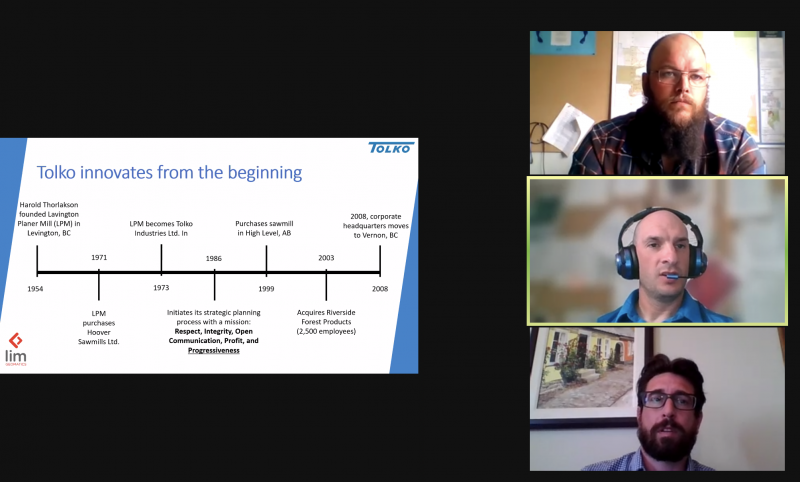
From top to bottom: Nicholas Genier, woodlands operations supervisor, Tolko High Level; Mike Morgan, harvest operations supervisor, Tolko High Level; and Alexander Ryerson, forest information specialist, Lim Geomatics, at OptiLog 2021.
As any logger knows, “time is money,” Morgan said. And a large operation like Tolko High Level knows this better than most. Before installing Op Tracker, the mill spent money and time hanging markers in the bush to identify cutblock boundaries and sensitive areas. On top of that, the older systems they used were time-consuming – Morgan had to visit each individual machine to update the data.
But now, with Op Tracker, a web-based system, he can go online in his office and monitor equipment. He can see where contractors are harvesting – a key tool for Tolko High Level, which employs five contractors operating in a three-million-hectare area. This means “there can be 40 different feller bunchers in an area on any given day, and we can see where they’re operating and where they’re going,” Morgan explained.
Operators are also alerted by Op Tracker if they approach the cutblock boundaries, which are digitized, and they can input georeferenced notes if they come across something that was missed on the map. The program features two-way synchronization so operators can push data to the office and create new maps, allowing Morgan to communicate with operators on any errant data. The web-based application also calculates analytics nightly, and provides Morgan with updates in the morning so Tolko High Level can “quickly adapt to changes and required volumes” based on the data.
Over the years, Tolko and Lim Geomatics have worked together to evolve Op Tracker from a map only showing cutblock boundaries to having imagery with topography. This allows operators to make decisions in the field, making contractors more productive, “which makes them more money and makes us more money,” Morgan explained.
It also allows for downtime tracking, increased communication and collaboration, Genier added. Operators are in control of how they view Op Tracker, so they can see who has done what and where.
Contractors are also able to see progress reports for each machine and schedule things like maintenance or which machine should go in a certain block. Its easy-to-use interface and reporting means Tolko High Level has gotten the all-important contractor buy-in.
Addressing the driver shortage
While increasing loggers’ productivity through technology is critical to the industry’s future success, there is another issue that needs to be addressed: the log truck driver shortage. In fact, according to Jan Michelsen, lead researcher, transportation, for FPInnovations, 33 per cent of drivers in Canada will enter retirement age in the next 10 years, and only three per cent are under the age of 25 right now.
The solution to this labour crunch? Truck platooning.
Michaelsen and Joseph Putney, director of commercial systems at Robotic Research, gave OptiLog attendees an update on their work to bring off-road truck platooning to the forest industry. The two companies recently announced a partnership to test Robotic Research’s autonomous trucking solution in Canada’s forests.
Jan Michaelsen, lead researcher, transportation, FPInnovations (top) and Joseph Putney, director of commercial systems, Robotic Research LLC, at OptiLog 2021.
Truck platooning in forests presents a number of challenges, Michaelsen explained. One challenge is designing a system that works for the many types of trucks used in forestry, such as B-Trains and off-highway log trucks ranging from 100 to 120 tons. Another challenge is that logging trucks are often travelling on gravel roads with no edges, tight turns, steep slopes, thick forestry cover, etc., which is hard on electronics and can block GPS signal.
FPInnovations has been trialing truck platooning on resource roads since 2018, when they did the first demonstration of logging trucks on forest roads using a platooning system. In 2019, they completed over 1,000 kilometres of driving using a platooning system.
The technology has performed above expectations, Michaelsen shared. But, there were some technological gaps, such as the impact of steep roads, the use of the foundation brake, and foliage coverage cutting out GPS signal. This means that “we can’t depend on GPS or perception tracking from the following trucks.”
This is where Robotic Research’s truck platooning technology comes into play. Robotic Research has been doing truck platooning on challenging roads for 19 years, operating vehicles without drivers for the U.S. Army, Putney explained. The company has never used GPS or clear line markings with its technology, and with its autonomy stack, AutoDrive, they can connect groups of vehicles, rather than just the leading truck talking to the preceding vehicle.
Robotic Research also uses different sensors such as LiDAR to “mix and match the positives of each sensor,” Putney shared. FPInnovations and Robotic Research will be working together to trial the technology on resource roads this year.
Building a robust understanding
Speaking of trialing new technology, the final presentation of the day focused on potential new uses of AI in making cutting decisions. Karim Koreitem, co-founder and CEO of a robotics start-up called Scaffold AI, shared the results of the company’s efforts to use perception technology to build a “robust, semantic understanding of forests below the canopy.”
The technology can “identify trees or offer real-time feedback on tree characteristics and which ones to cut,” he explained. It can isolate tree trunks and identify the species and wood quality. That information can then be combined in 3D maps below the canopy to build up a catalogue of tree trunks.
Karim Koreitem, co-founder and CEO, Scaffold AI, at OptiLog 2021.
So far, Scaffold AI has done simulations with this technology, collecting data using an autonomous drone navigating below the canopy. Those simulations have been used for field trials, testing the sensors in a hand-held demo device, on drones, or on-board vehicles such as feller bunchers.
The technology has been “very successful at isolating trees within five metres,” and can estimate the diameter of a tree within three centimeters, using off-the-shelf, accessible sensors, Koreitem said.
The company is working with a large forestry player in Ontario, mounting the sensor system in the cabs of machines.
Scaffold AI’s ultimate goal is to leverage their perception systems to “identify trees, extract characteristics and provide operators with tree-by-tree cutting decisions to reduce the decision-making burden,” Koreitem explained. This will boost productivity and reduce training time.
Watch online
Missed the live event? All of the sessions are available on-demand. This includes both the live sessions and two on-demand sessions: “How to advance forestry training with technology,” by Juilen Richer-Lanciault, product manager at CM Labs, and, “The future of forestry training,” by Mario Leduc, assistant director at Mont-Laurier Vocational School.
All of the sessions are available for free. Click here to register and watch.
Thank you to our sponsors John Deere and Tigercat for making this event possible.
Print this page